Motion Block
Description
Arm Capture is used to setup the system to record the axis position when a specified input occurs. Arm Capture resets the capture latches for the related axis. When Capture Has Tripped the Capture Position information is valid and can be used by the motion application. The hardware capture latches can record an event with the resolution of the encoder and provide additional precision over software capture methods.
Escapes
The Arm Capture blocks does not produce any escapes.
Examples
This block list shows the commands involved in configuring a capture event, performing a capture, and reading the result.
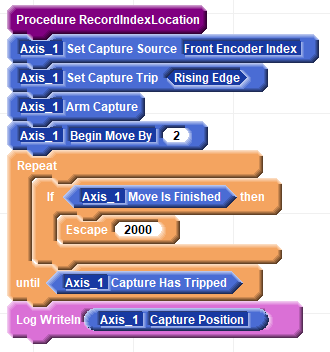
A source for the signal is chosen, the rising edge is chosen, and the capture is armed. Motion is started that should be far enough to cause the capture event to occur. The controller then waits until the capture trips. If the move finishes before the capture trips (which should not happen) then an exception is generated to notify the program that uses this procedure that something has gone wrong. If the capture does occur it is recorded in a list box named log.
This structure is an example of a "position out" that could be considered analagous to a "time out". With a time out something is suppsosed to occur within a certain amount of time and the absence of that occurance is an error. With motion systems the amount of time for a move can vary depending on speeds and accelerations. Rather than expecting something to occur in a certain amount of time it is more robust to have structures that expect things to happen within certain distances.
Related Topics
Capture Position
Set Capture Trip
Set Capture Source
Capture Has Tripped
Capture Bit