Command
<axis or group> STP
Description
The Stop command directs the axis or group to slow down at the specified decel rate and stop motion. This can be used to stop a continuous Jog or to stop a move early. A coordinated group will remain coordinated during the stop. This is a blocking command and the subsequent actions will not occur until the motion has come to a complete stop. This is different from Begin Stop which will start to decelerate but will immediately continue with subsequent actions. The blocking nature of this command means that subsequent ASCII commands from the host will not be interpreted until the motion has come to a stop.
Escapes
The Stop command does not generate any escapes.
Examples
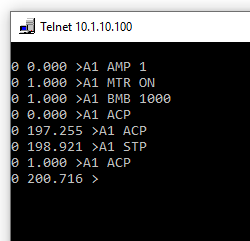
This command list starts a long move but ends it early with the Stop command:
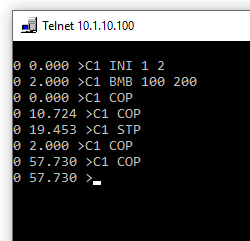
This list stops a coordinated move early:
Related Topics