Text Language Definition
function TNAxis.CommandedPosition:double ;
Description
Commanded Position returns the intended or desired position of the motor as calculated by the built-in motion profiler or an application program performing motion profiling. During the course of a profiled motion this number will smoothly change to represent the trajectory of the motor. Set Actual Position is different from Commanded Position. For a servo motor the Actual Position is the position reported by the encoder and will be different than Commanded Position because of servo error. For a stepper motor the Actual Position is the number of electrical pulses that have been sent out from the controller. For multidimensional axis groups the Commanded Position is the vector path length into the move relative to the beginning of the move. This can be used to perform actions at milestones along along a multidimensional trajectory. Commanded position is most often used during data collection studies to examine an intended motion path or when using virtual axes to create specialized motion effects.
Escapes
Commanded Position does not produce any escapes.
Examples
This procedure shows the commanded position of a single axis:
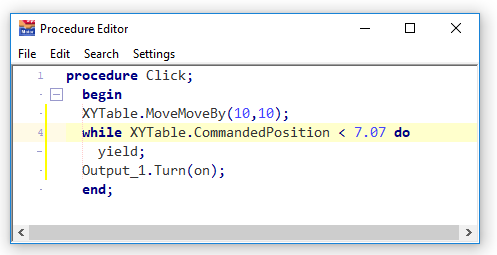
This procedure sets an output half way through a diagonal path. The commanded position of a vector path is 0 at the beginning of the move and grows to the vector path length towards the end.
Related Topics
Set Commanded Position
Actual Position
Error Position
Destination Position
Capture Position