Text Language Definition
procedure SetCurrentTo(var Motor:T1Axis; Current:single);
Description
Set Current To sets the maximum phase current for internal stepper motor drives. Instrumentation monitoring the current of an internal drive set to 2 amps during very slow rotation of the motor would measure the current going up to 2 amps, diminishing down to -2 amps, and then increasing back to 2 amps sinusoidally. Note the current specifications on the motor data sheet. If the current specification is RMS then command parameter should be the RMS specification * 1.4. Excessive current can overheat a motor and not produce any torque improvement if the magnetics saturate. Insufficient current may not provide sufficient torque. Current management policies such as current cutback and current ramping can be implemented as tasks.
Although axis related this command is a procedure which takes the axis name as a parameter rather than an axis object method where the name comes first.
Escapes
Set Current To does not generate any escapes. If the requested current is above available current the maximum available current will be used.
Examples
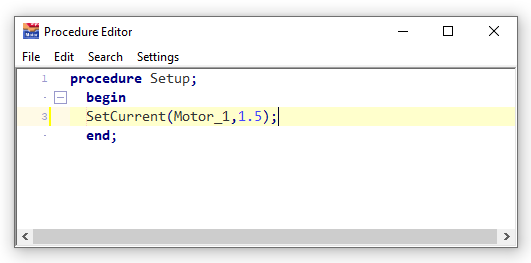
This SetCurrent command, used in the setup procedure, establishes a default current setting:
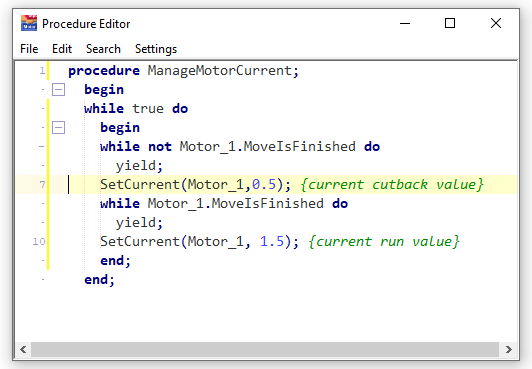
There is often a need to have full current during motion but reduce the current once a destination has been achieved to reduce motor heating. This can be accomplished with a procedure such as this:
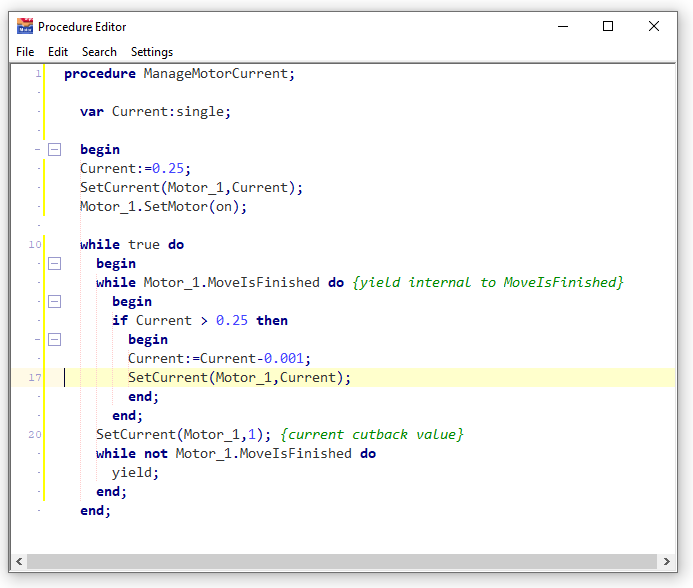
This approach can manage the motor current for Motor_1 even if Motor_1 is being directed as a component axis of a multiaxis group. The Move Is Finished status for a component axis is reflected up to the group. If the group including Motor_1 is moving, then the move is not finished for Motor_1 and this current management policy would work as expected. It would be better if the current diminished slowly rather than suddenly. This alternative procedure has this additional feature:
Related Topics