Command
<axis or group> ABT
Description
The Abort command immediately and abruptly stops motion without a controlled deceleration. Abort is generally only used at very slow speeds or in a situation where motion progress of any kind is catastrophic and it is necessary to apprehend all motion. A single axis move or a coordinated multi-axis move can be aborted.
Escapes
The Abort command does not generate any escapes.
Examples
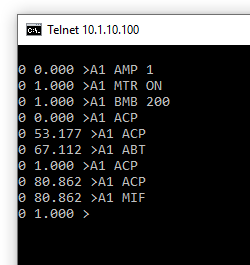
This command sequence relates to axis 1. The current is set to 1 amp, the motor is turned on, a relative move is started to a destination of 200. The actual position is reported several times showing progress. The move is aborted and the actual position reported several more times demonstrating that the axis has stopped. The Move Is Finished command confirms that the motion has stopped.
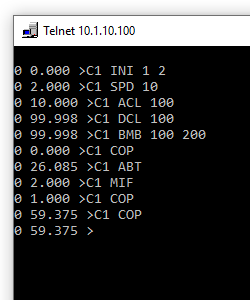
This command aborts a two axis coordinated group after starting a vector move:
Related Topics