Motion Block

Description
Set Coordinate Inversion is used to change the direction a motor or encoder regards as positive. Axis direction is influenced by mechanical transmission reversals, encoder phase definition, and wiring conventions. If the motor does not move in the direction regarded as positive this command may be used to invert the direction by calling with a non-zero parameter. This command operates in an incremental manner by inverting the coordinate frame about the current Actual Position rather than 0. The best time to use this command is during initial setup before homing has been performed. This is not intended to be used after initialization as it can relocate the origin.
Escapes
Set Coordinate Inversion does not generate any escapes.
Examples
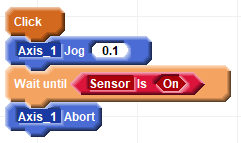
This block list aborts motion when a sensor is detected to position the motor at a detected location:
This alternative block list for the same task avoids the abruptness of aborting by noting where the sensed position is located, decelerating, and returning to that location.

Even though it involves a second move to return to the detection location this approach can be much faster since the search speed can be faster. However with faster speed comes less precision since the controller is generally only sampling at 1 kHz permitting in this case a user unit position uncertainty of 0.002.
This uncertainty can be eliminated by using the hardware capture function of the controller that associates the sensed event with a specific location:

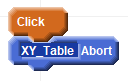
This block list stops a multiaxis move:
Related Topics