Motion Block
Description
Profile Velocity returns the current commanded speed (signed magnitude) that is being used to generate the trapezoidal motion trajectory. During slew, the magnitude of Profile Velocity is the same as Speed. During Accel and Decel the profile velocity varies linearly with progress through the phase. The value returned is the value of the trapezoidal profile, not the actual motor speed itself. Reading the actual speed requires an application program that differentiates position information and returns a value in a user variable.
Escapes
The Profile Velocity block does not generate any escapes.
Examples
Consider a machine with a laser that had variable intensity based on an analog input. As the speed of the laser is increased it is necessary to increase the voltage to this input. The following block list would ratio the analog output of the laser to the current speed of the axis:
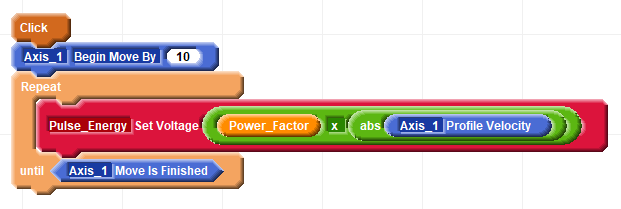
The Abs block is needed since the Profile Velocity block will return a negative value for motion occurring in the negative direction but the voltage needs to remain positive regardless of direction.
Related Topics