Motion Block
Description
Set Error Limit is used to describe how far a physical axis's Actual Position can lag behind the Commanded Position without that lagging being considered an error. In the ideal case the motor's Actual Position exactly follows the Commanded Position but system dynamics and transient response of the motion control law often make this goal impossible. However, the error can be minimized for profiles without acceleration. Systems which undergo high acceleration and deceleration are likely to incur hysteresis if the power system saturates. If the difference between the Actual Position and Commanded Positions exceeds the Error Limit that was set, the axis will perform a Motor Off.
Escapes
The Set Error Limit block does not produce any escapes.
Examples
This Show Event displays the error position
This block list sets the position of a 3 axis robot where the Z axis is in an elevated, out of the way, position at the end of the homing procedure:
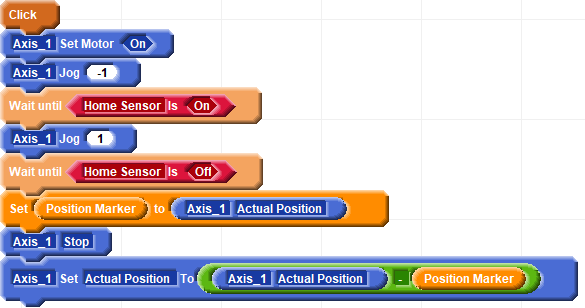
This is a simple homing procedure that concludes by setting the actual position:
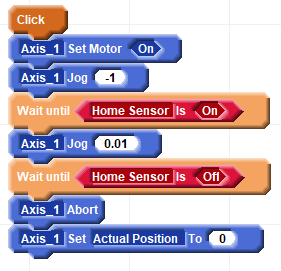
This alternative procedure avoids use of the abrupt Abort command and is just as accurate:
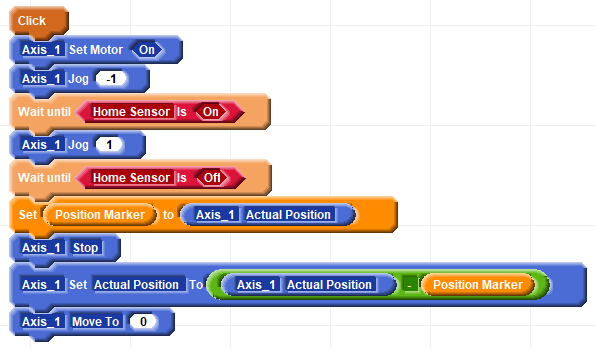
Although accurately homed a position display would show that the axis is not at 0 but at a number which corresponds to the decel distance after the sensor edge was found. Seeing the position after homing not be "0" is for some applications unexpected. If that is a concern the motor can be moved back to zero:
There are additional considerations for homing. Review the Homing topic to see what pertains to the current application.
Related Topics