Set Motor
Motion Block
Description
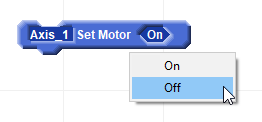
Set Motor is used to turn motor positioning control on and off for an axis or all of the axes in the related group. Called with a parameter value of true enables the amplifier lines. The motor establishes the current Actual Position as the commanded, or desired, position so as to remain still. When called with a parameter value of false the amplifier lines are disabled, the motor command is set to 0 volts (if configured for servo) and no further motor activity occurs. Readability of the program is improved by using the predefined boolean constants On and Off.
Escapes
Set Motor will produce a Watchdog Has Tripped EscapeCode
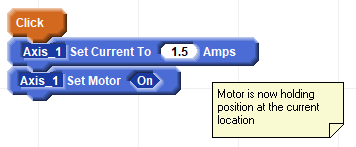
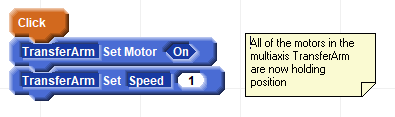
Examples
Related Topics