This alternative block list for the same task avoids the abruptness of aborting by noting where the sensed position is located, decelerating, and returning to that location.
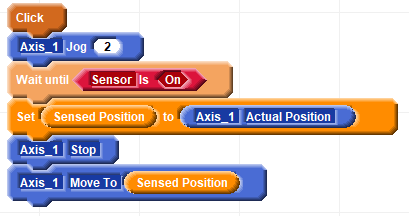
Even though it involves a second move to return to the detection location this approach can be much faster since the search speed can be faster. However with faster speed comes less precision since the controller is generally only sampling at 1 kHz permitting in this case a user unit position uncertainty of 0.002.
This uncertainty can be eliminated by using the hardware capture function of the controller that associates the sensed event with a specific location:

This is a simple homing procedure that concludes by setting the actual position:
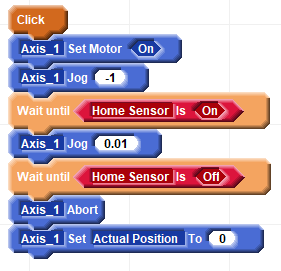
This alternative procedure avoids use of the abrupt Abort command and is just as accurate:

Although accurately homed a position display would show that the axis is not at 0 but at a number which corresponds to the decel distance after the sensor edge was found. Seeing the position after homing not be "0" is for some applications unexpected. If that is a concern the motor can be moved back to zero:
