Command
<axis> ACT
Description
Arm Capture is used to setup the system to record the axis position when a specified input occurs. Arm Capture resets the capture latches for the related axis. When Capture Has Tripped the Capture Position information is valid and can be used by the motion application. The hardware capture latches can record an event with the resolution of the encoder and provide additional precision over software capture methods.
Escapes
The Arm Capture command does not produce any escapes.
Examples
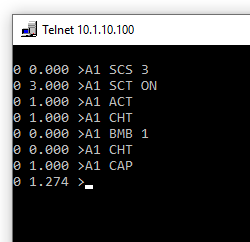
This list of commands configures a capture event, performs a capture, and reads the result. A capture source is chosen, a capture edge is chosen, and the capture is armed. Motion then occurs. A check is made that the capture event has occurred. When the capture has been confirmed tripped the capture position is valid and can be reported.
Related Topics
Capture Position
Set Capture Trip
Set Capture Source
Capture Has Tripped
Capture Bit